Think about a situation when you ordered merchandise online and you were eagerly expecting this package. Each day you watched through your window for the delivery truck to arrive, but unfortunately, it ended up arriving later than expected. In such a case, you would have benefited from a tracking system via your phone or computer. Then, you could know exactly when your package would arrive. Or think about another situation, when your child is picked up from school by the after-school service provider and you wonder if he or she has reached the destination safely. If there was an option to track the vehicle through your phone during your child’s journey it would be very useful.
Fortunately, this is a now a reality, and is called a vehicle tracking system. The vehicle tracking system uses a Global Positioning System (GPS) tracker plugged into an On Board Diagnostic (OBD) port on a vehicle. When the vehicle travels, the GPS tracker with its built-in antenna sends data on the exact position of the vehicle, speed, time, and other related information to a network server in real time. Designated receivers pick up this data from the server and convert it to a format which can be consumed by desktop or smartphone apps to track the vehicle’s movement.

On Board Diagnostics (OBD) Port
In recent years, there has been a proliferation of electronic technologies in the automobile, and motor vehicles at large have undergone an extensive evolution. One significant advancement is the addition of in-built computer systems to monitor and control vehicle health functions, such as engine emissions, fuel injection, driving speed, anti-lock brakes, etc. The computer receives information from different sensors and adjusts required parameters to keep the vehicle’s several functions working optimally. For example, automotive computers adjust engine parameters as needed to keep emissions within critical limits. There are several Electronic Control Units (ECUs) dedicated for critical vehicle functions, and each ECU is built with microcontrollers. There are about 50 or more ECUs in a modern automobile. The microcontrollers receive data from the sensors, make calculations and send commands when required through communication channels such as the popular Controller Area Network (CAN).
One control unit in a modern car is a computer-based system called an On-Board Diagnostics (OBD) system. The Federal Clean Air Act Amendments of 1990 required that all new vehicles built on or after 1996 have a built-in, standardized OBD system in the vehicle. The system, referred to as the OBD-II system, generates diagnostics codes called Diagnostic Trouble Codes (DTCs). If a malfunction warning shows up on the dashboard, the service engineer can access the trouble codes by plugging an OBD-II scan tool through the OBD-II port. This port is accessed through the Data Link Connector (DLC). These codes help service professionals rapidly identify the cause of a malfunction and repair it quickly and precisely. The DLC is a 16 pin diagnostic connector located beneath the dashboard close to the driver’s seat. The main purpose of the DLC or the OBD-II port is to download the trouble codes and find the source of malfunction. However, the port usually remains unused. Vehicle tracking systems with today’s smart technologies use diagnostic codes for the alternate purpose of tracking the vehicle via GPS. To get the vehicle tracking data, simply plug-in any GPS tracker to the 16 pin OBD-II port and it will gather the data.
The 12V battery power to the OBD-II port is always supplied, even if the vehicle is locked and there is no key in the ignition switch. We can plug and unplug vehicle trackers to and from the OBD-II port whenever desired. These plug-unplug events on a permanently “hot” socket can cause Electrostatic Discharge (ESD) events. It can reach up to hundreds of volts resulting in the damage to the electrical circuit. ESD protection of the circuit can be achieved by placing a Transient Voltage Suppression (TVS) diode on each data line connected to the GPS tracker pins. The TVS diodes protect data ports from ESD threats by arresting the system level ESD peak in less than a nanosecond, and diverting high currents away from the data port. They effectively clamp high voltage peaks and help avoid system damage of the GPS tracker as well as the car. Under normal operating conditions, the TVS diode presents a high impedance path to the GPS tracker circuit, so the device appears as an open circuit and does not interfere with the signal transfer.
The next obvious question is how to determine which TVS diode is required to protect which pin among the 16 in an OBD-II port. Another important decision to make is whether we can use one single TVS diode for each pin, or multi-line TVS diodes for a group of pins. To get these answers, we need to obtain more details regarding the type of signal associated with and the electrical characteristics of the 16 pins in the connector of the OBD-II port.

OBD-II Pin Configurations and Protocols
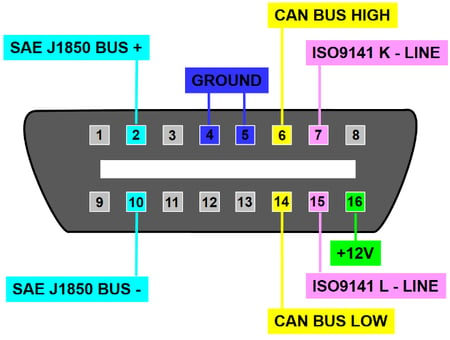 Figure 1. OBD-II connector and pinouts
Figure 1. OBD-II connector and pinouts
Figure 1 shows the OBD-II 16-pin diagnostic connector also referred to as a J1962 connector and its pin configuration. Pin 16 supplies power and is connected to the battery of the car. Pins 4 and 5 are connected to ground. Pins 6 and 14 are connected to CAN Bus High and CAN Bus Low signals respectively. Pins 2 and 10 use the SAE J1850 protocol, pin 2 for positive and pin 10 for negative. Pins 7 and 15 use ISO9141 protocol K-line and L-line respectively. Pins 1, 3, 8, 9, 11, 12, and 13 are left blank and can be used by a car manufacturer for other purposes.
OBD-II permits mostly four different communication protocols (shown in T
able 1) to communicate with the OBD-II interface. Each vehicle manufacturer has their own preference of protocol.
Table - 1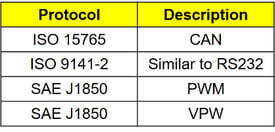
- ISO 15765: ISO 15765 is an international standard for sending data via a CAN bus. CAN consists of two wires named CAN High and CAN Low. CAN High reaches 3.75V when transmitting any data. At the same time, the CAN Low drops down to 1.25V. When the CAN bus is not transmitting any data, both CAN High and CAN Low remain at 2.5V. The maximum data rate defined by the standard is 1Mbps. CAN High is connected to pin 6 and CAN Low is connected to pin 14.
- ISO 9141-2: ISO 9141-2 is an asynchronous serial communication and it uses two signals, K and L. K signal is basically the medium for most communications through OBD-II. The L signal is used for the initialization of the bus. The maximum data rate is 10.4Kbps and maximum signal voltage is 12V. K-Line is connected to pin 7 and L-Line is connected to pin 15 of the OBD-II port.
- SAE J1850 (PWM): SAE J1850 protocol was created by the Society of Automotive Engineers (SAE). SAE J1850 PWM is implemented by Pulse Width Modulation method by using a differential transmission scheme. The signal rate for PWM is 41.6 kbps. The maximum voltage level is 5V. SAE J1850 Bus + and SAE J1850 Bus – are connected to pin 2 and 10 of the OBD-II port respectively.
- SAE J1850 (VPW): SAE J1850 VPW is implemented by Variable Pulse Width method and uses one signal wire and one ground wire. The signal rate for PWM is 10.4 kbps. The maximum voltage level is 7V.
This is the first part in a blog series about ESD protection of OBD-II ports.

Semtech® and the Semtech logo are registered trademarks or service marks of Semtech Corporation or its affiliates. Other product or service names mentioned herein may be the trademarks of their respective owners.